Data-driven simultaneous identification of the 6DOF dynamic model and wave load for a ship in waves🔥🏆
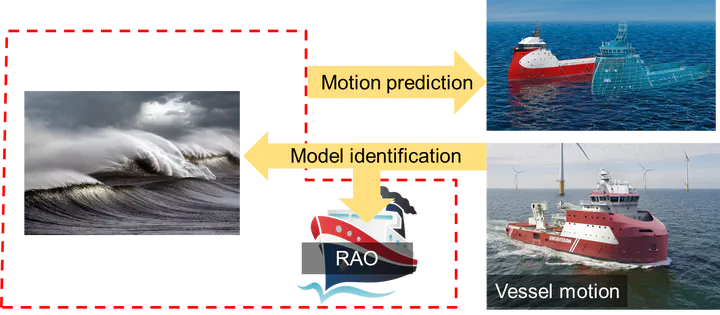
In marine operations, the performance of model-based automatic control systems and decision-support tools critically depends on the accuracy of the underlying mathematical models. High-fidelity models are essential for ensuring safe voyages and efficient offshore activities, such as dynamic positioning, lifting, and pipe-laying operations. While significant research has focused on identifying ship dynamics in the horizontal plane (surge, sway, and yaw), a comprehensive 6 Degrees of Freedom (6DOF) model—incorporating heave, roll, and pitch—remains largely unexplored. The complexity arises from strong coupling effects between all degrees of freedom and the significant influence of environmental loads, particularly waves.

Traditional model identification methods face several challenges. Parametric approaches often rely on assumed model structures with a limited number of terms, potentially overlooking complex hydrodynamic interactions. Non-parametric or black-box methods, like neural networks, lack physical interpretability and exhibit poor extrapolation capabilities. Furthermore, most existing studies neglect wave-induced motions, which are crucial for the safety of many marine operations. Online estimation techniques, such as adaptive control, may only provide locally optimal solutions and struggle to fully utilize historical data effectively.
This research presents a novel data-driven framework for the simultaneous identification of a parametric 6DOF ship model and wave loads. The key innovations include:
- First White-Box 6DOF Identification: This is the first study to propose an onboard, white-box model identification for ships in waves using motion measurements, providing full physical interpretability.
- Sparse Regression Application: The method utilizes sparse regression (specifically LASSO) to select the most significant dynamic features from a vast library of candidate functions, avoiding the need for a pre-defined, limited model structure. 3. Comprehensive Load Modeling: The model incorporates coupled hydrodynamics, thruster inputs, mooring forces, and environmental loads (wind, current, and first- and second-order wave loads) into a unified formulation. 4. Wave Load Estimation and Prediction: It enables the estimation of wave-induced loads and facilitates short-term motion prediction, which is vital for real-time operational guidance.
The identification problem is framed as a sparse regression problem, solved using LASSO optimization. This approach penalizes the L1-norm of the coefficient vectors (ζ and ζw), promoting a sparse solution where only the most physically relevant terms have non-zero coefficients. A thresholding algorithm is subsequently applied to eliminate components with minor effects, resulting in a compact and interpretable model.
The algorithm was validated through wave basin experiments using a model drillship moored in regular waves with varying headings.
- Model Fitting and Prediction: The identified model demonstrated excellent accuracy in fitting the measured accelerations. More importantly, it achieved satisfactory short-term motion prediction (10-second horizon) for all 6DOFs, outperforming traditional online parameter estimation methods, which exhibited significant drift.
- Wave Load Estimation: The method successfully estimated the time-varying wave loads. The results were consistent with physical expectations: wave load magnitudes varied logically with wave heading, and the identified load periods matched the wave generator settings.
[论文下载]