Operability analysis for collaborative caisson towing using multiple towlines in shallow waters with complex seabed topography
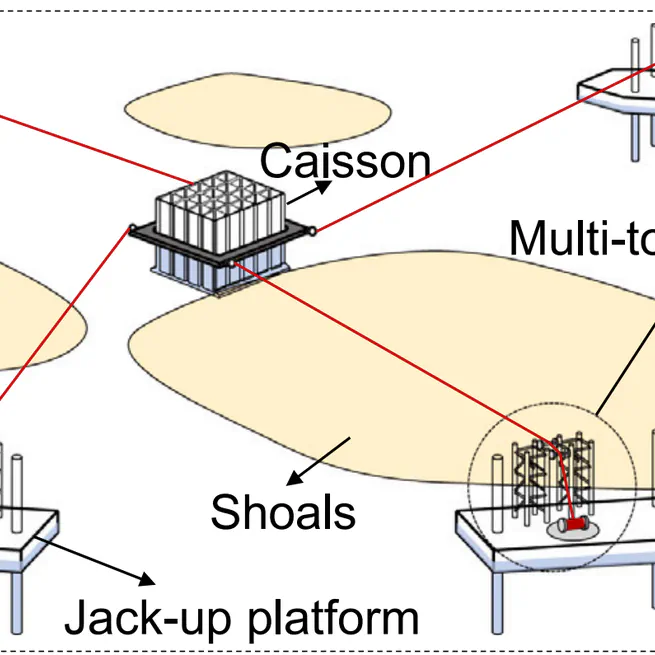
This study proposes a multi-towline collaborative towing method based on cable-driven parallel robots to enhance operational flexibility for caissons in shallow waters. It develops an operability analysis framework integrating potential flow theory, CFD validation, time-domain simulations, and a data-driven approach to determine passable regions under complex seabed conditions.
Feb 2, 2025