基于时频卷积交互的增量迁移学习用于风速和风电功率的多任务预测
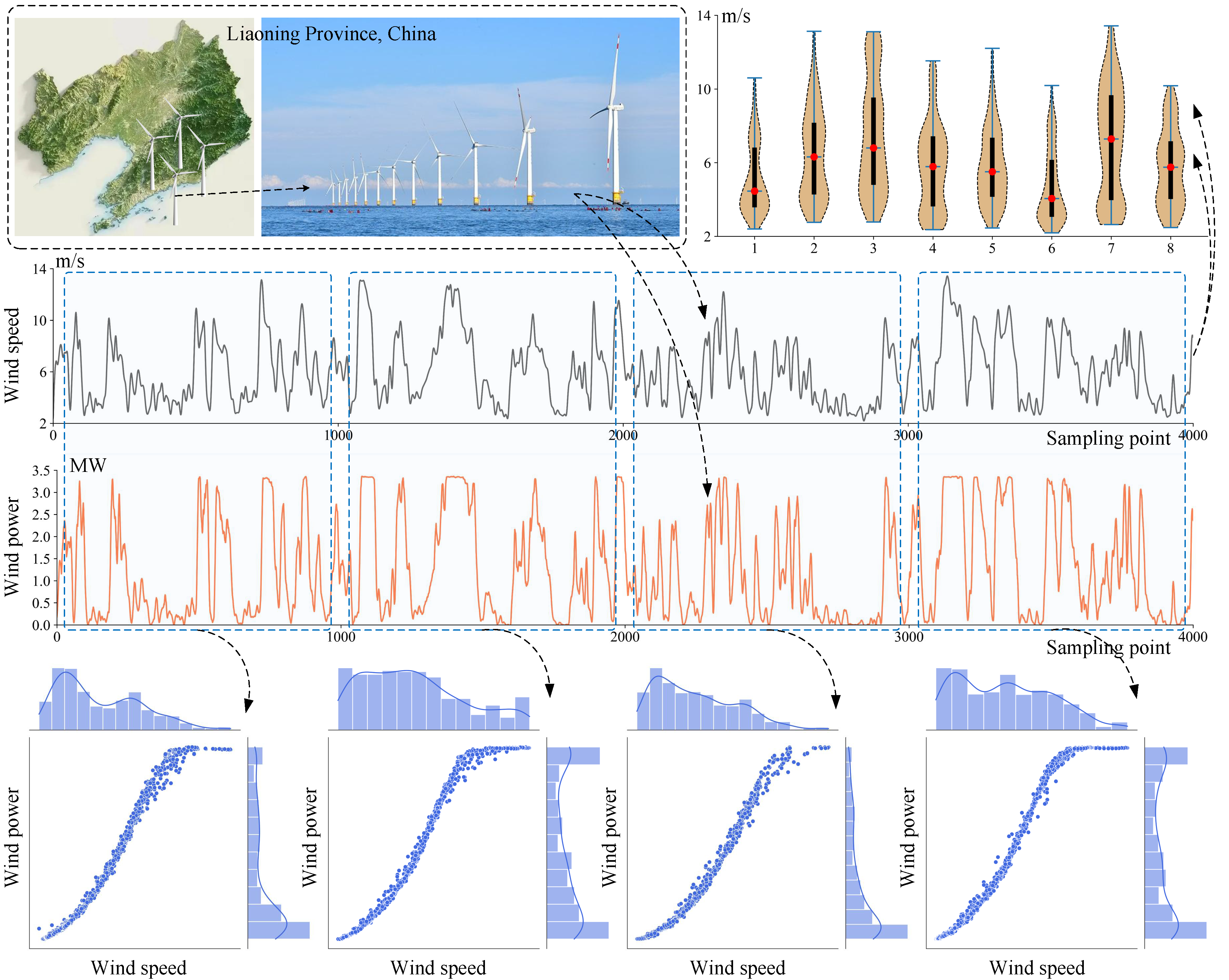
本文介绍了一种基于时频卷积交互的增量迁移学习方法,用于在历史数据不足的新建风电场中进行风速和功率的多任务预测。该方法将时频卷积交互神经网络整合到带有循环卷积和门控循环单元的并行框架中,与经典LSTM算法相比显著降低了预测误差。
本文介绍了一种基于时频卷积交互的增量迁移学习方法,用于在历史数据不足的新建风电场中进行风速和功率的多任务预测。该方法将时频卷积交互神经网络整合到带有循环卷积和门控循环单元的并行框架中,与经典LSTM算法相比显著降低了预测误差。
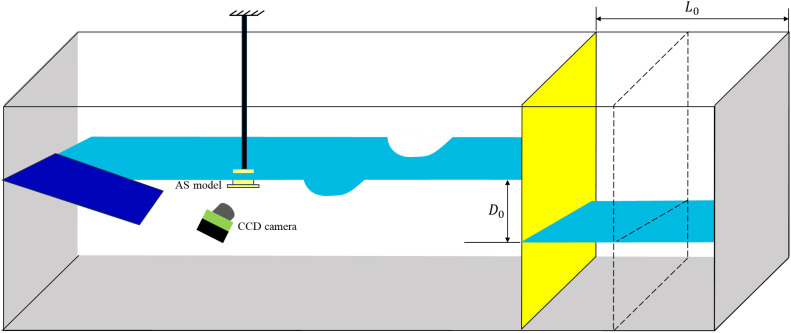
本研究提出了一种融合物理信息神经网络(PINN)与注意力机制的稀疏流场重建方法,实现了在极少观测数据条件下对潜式平台周围内孤立波流场的高保真重建。该方法将Navier-Stokes方程嵌入深度神经网络约束体系,提升了模型的物理一致性与跨场景泛化能力,为深海智能平台的安全感知奠定了技术基础。
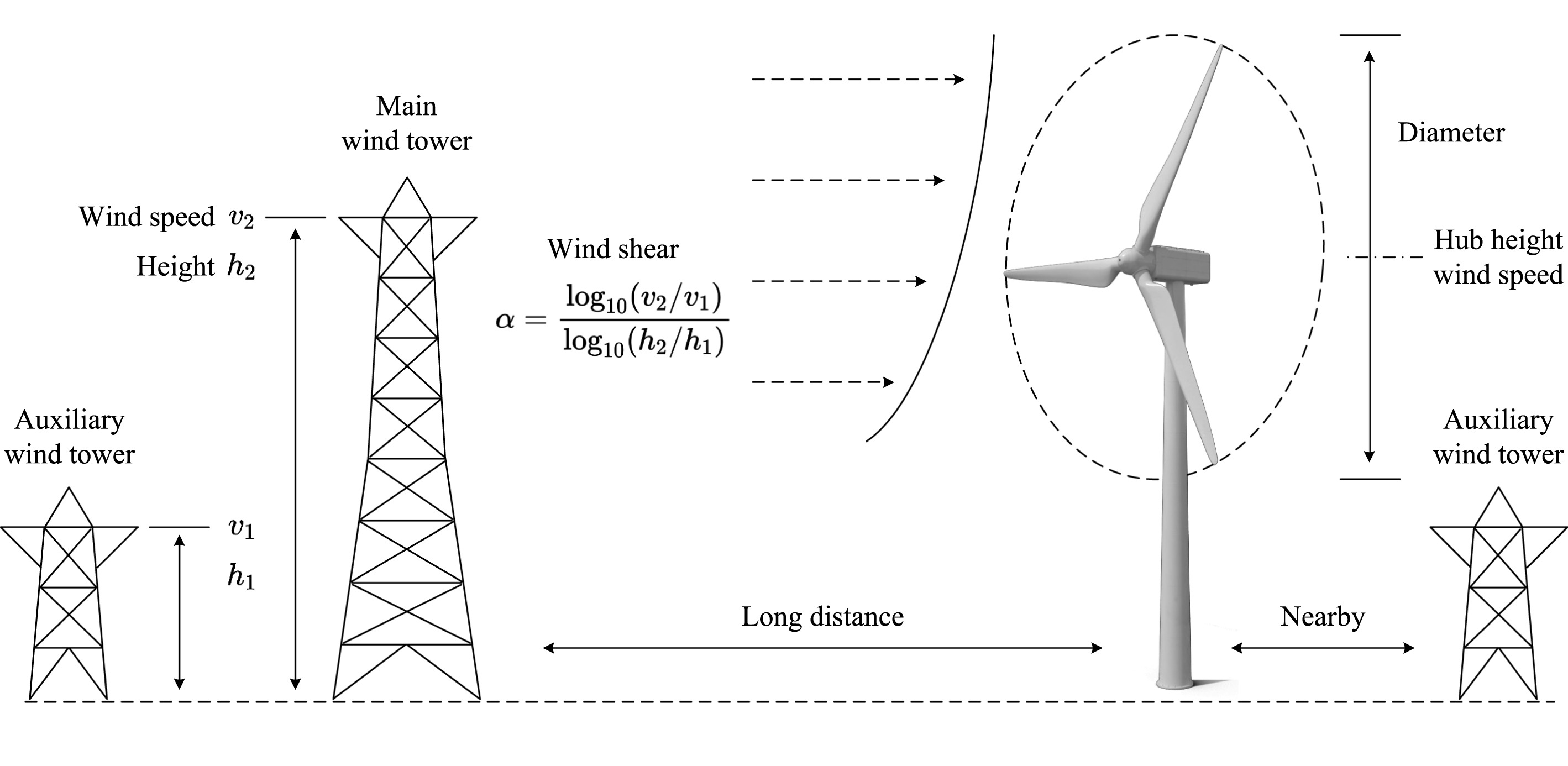
本研究提出了一种基于图神经网络的多任务学习方法,用于同时预测风速和风切变系数。该方法解决了风切变系数随气象条件动态变化的问题,克服了风切变现象与风速预测之间的耦合挑战。
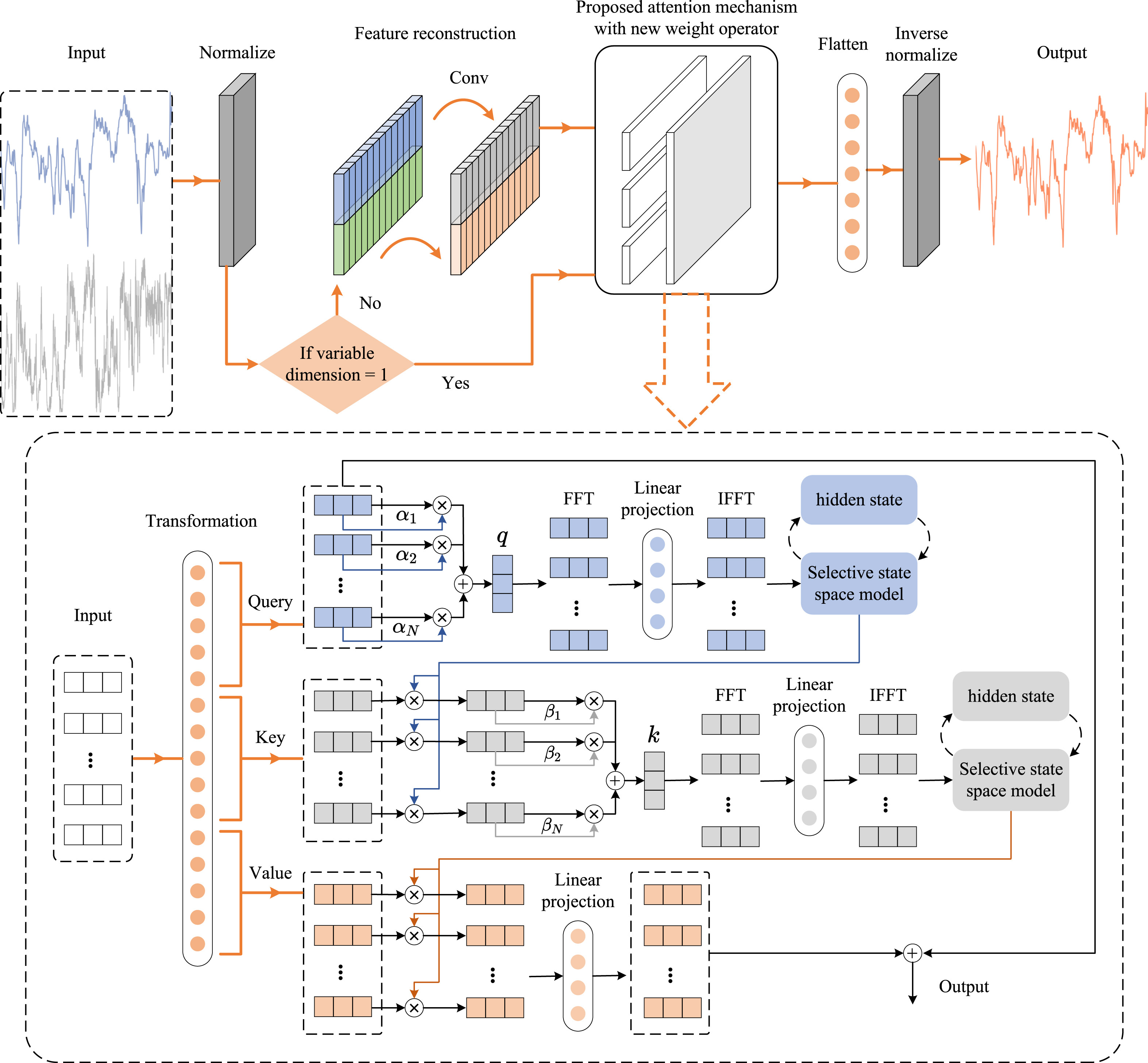
本文提出了一种新颖的选择性记忆注意机制,通过利用辅助变量提高风速预测精度。该方法引入自适应频域选择注意力权重算子,解析不同频率区间的有效信息,与经典LSTM算法相比显著降低了预测误差。
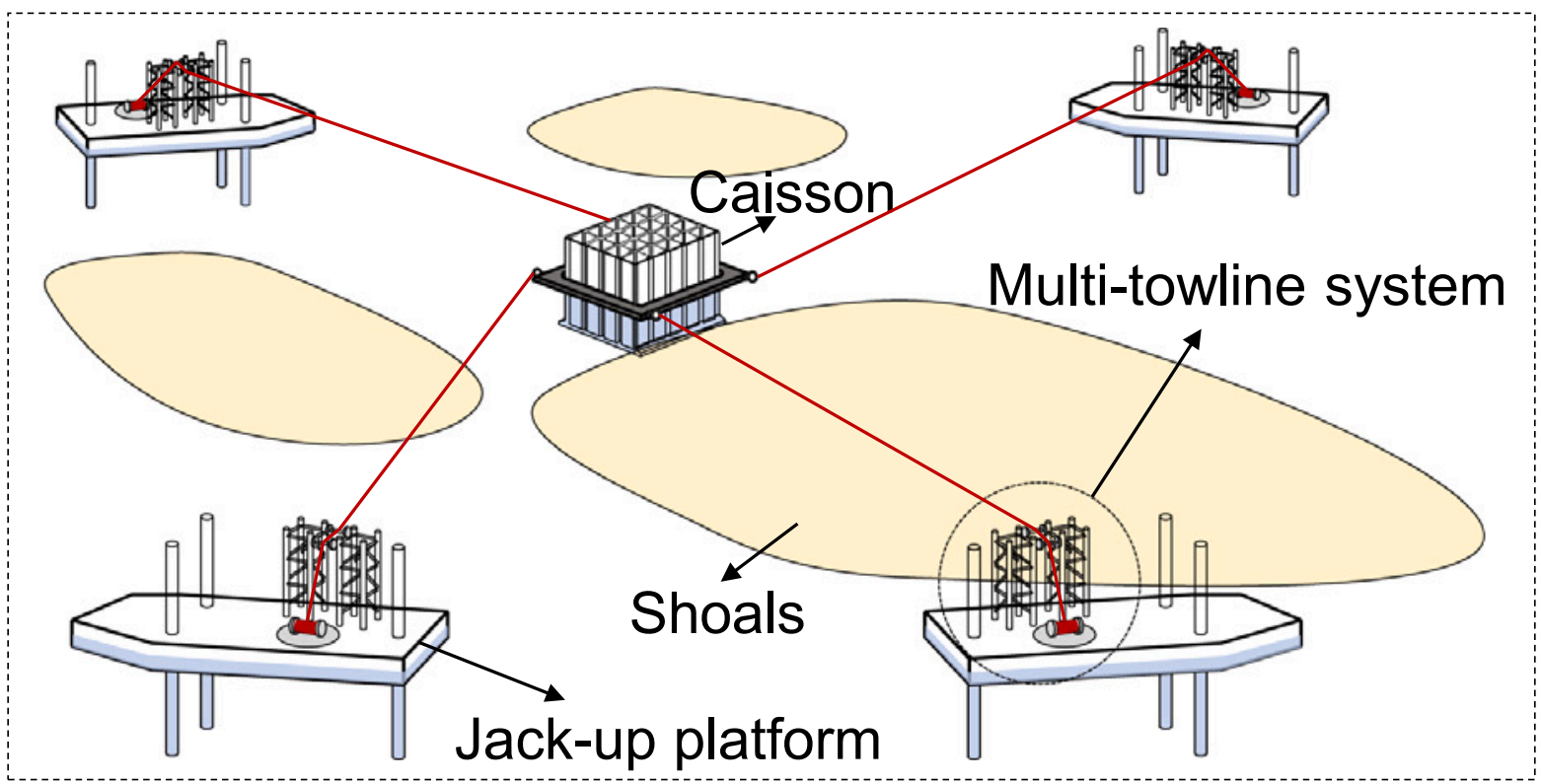
针对浅水复杂海底地形中的沉箱协作拖航可操作性分析,解决了通行性有限、搁浅风险和操纵性受限等关键挑战。通过提出基于电缆驱动并联机器人框架的多拖缆协作拖航方法,提高了海上结构(如港口墙和防波堤)建造的操作灵活性和安全性。这项研究的意义在于为海事作业事故预防提供了新途径,助力海岸工程的可持续发展。
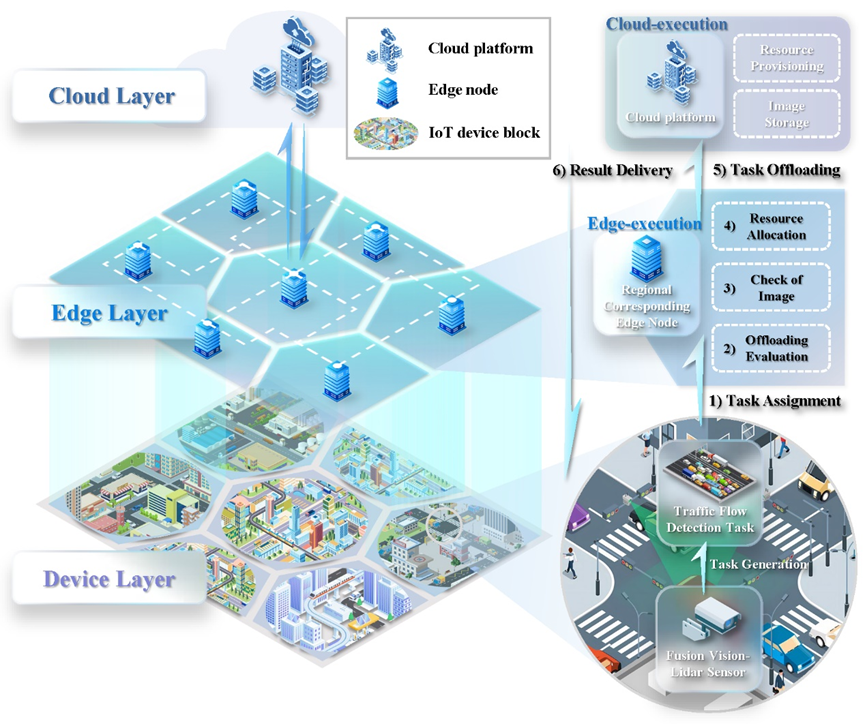
提出了一种新型框架,通过将大规模任务调度问题转化为几何区域划分问题,结合类俄罗斯方块的任务卸载策略和自适应资源分配算法,有效解决智慧城市中大规模边缘计算的任务调度和资源分配挑战。实验结果表明,该方法显著降低了任务截止时间违反率,相比现有方案性能提升20倍以上。
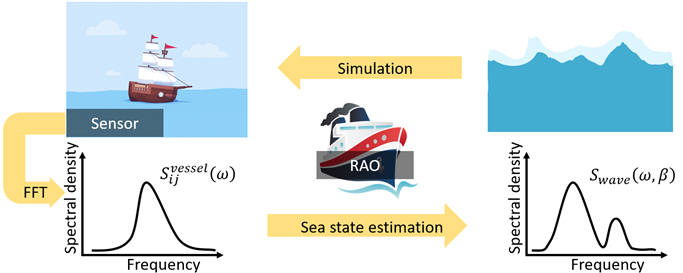
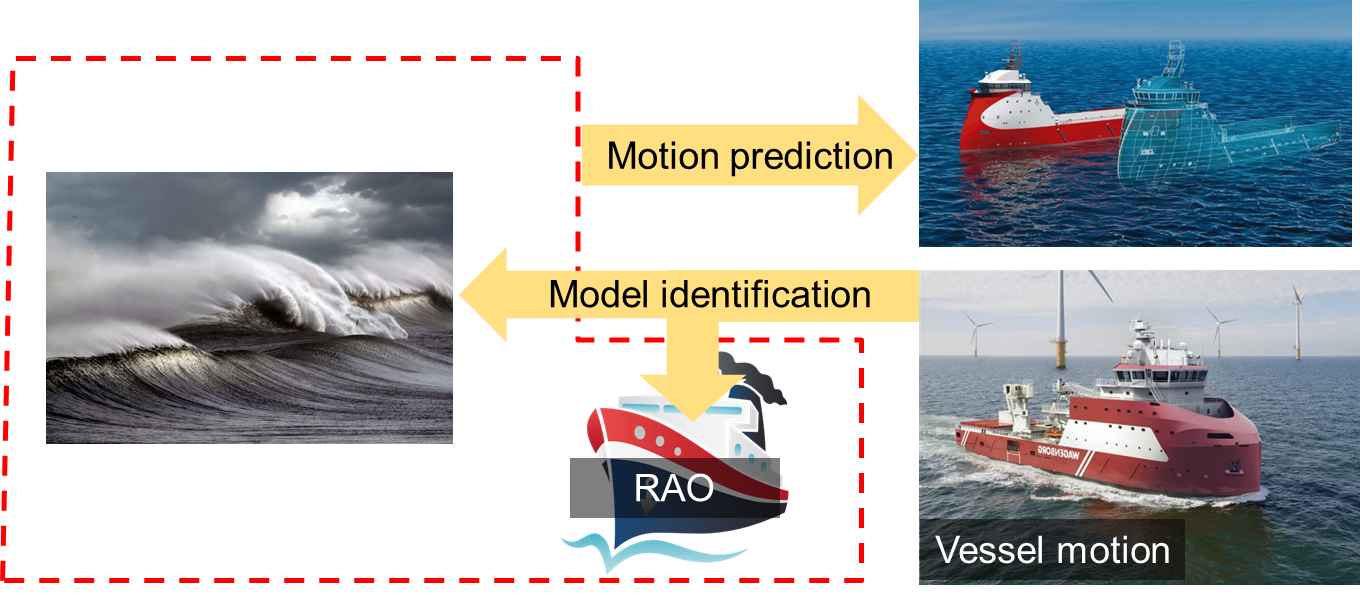
实时海况信息对海洋作业至关重要。波浪浮标模拟(WBA)利用船舶运动响应估计波谱,是一种低成本的实时方法。然而,该方法易受船舶响应振幅算子(RAO)非均匀分布的影响,在特定海况下导致估计性能下降。本研究首次引入“受限等距性质”(RIP)理论来评估WBA的性能。研究提出了一个RAO驱动的评估标准,用于预先判断估计的可靠性 ,并基于此开发了一种多谱融合算法。该算法能有效融合来自不同几何形状和航向的多艘船舶的估计数据,以生成一个更鲁棒、更准确的综合结果。数值实验验证了该算法的有效性。
本文提出了一种基于稀疏回归(LASSO)的六自由度船舶模型与海浪荷载同步辨识方法。该方法首次实现了基于运动测量的船舶六自由度白箱模型辨识,具有完整的物理可解释性,能够综合考虑水动力耦合、推进器输入、系泊力和环境载荷等因素,实现海浪诱导载荷估计和短期运动预测。文章入选ESI高被引论文和ESI热点论文。
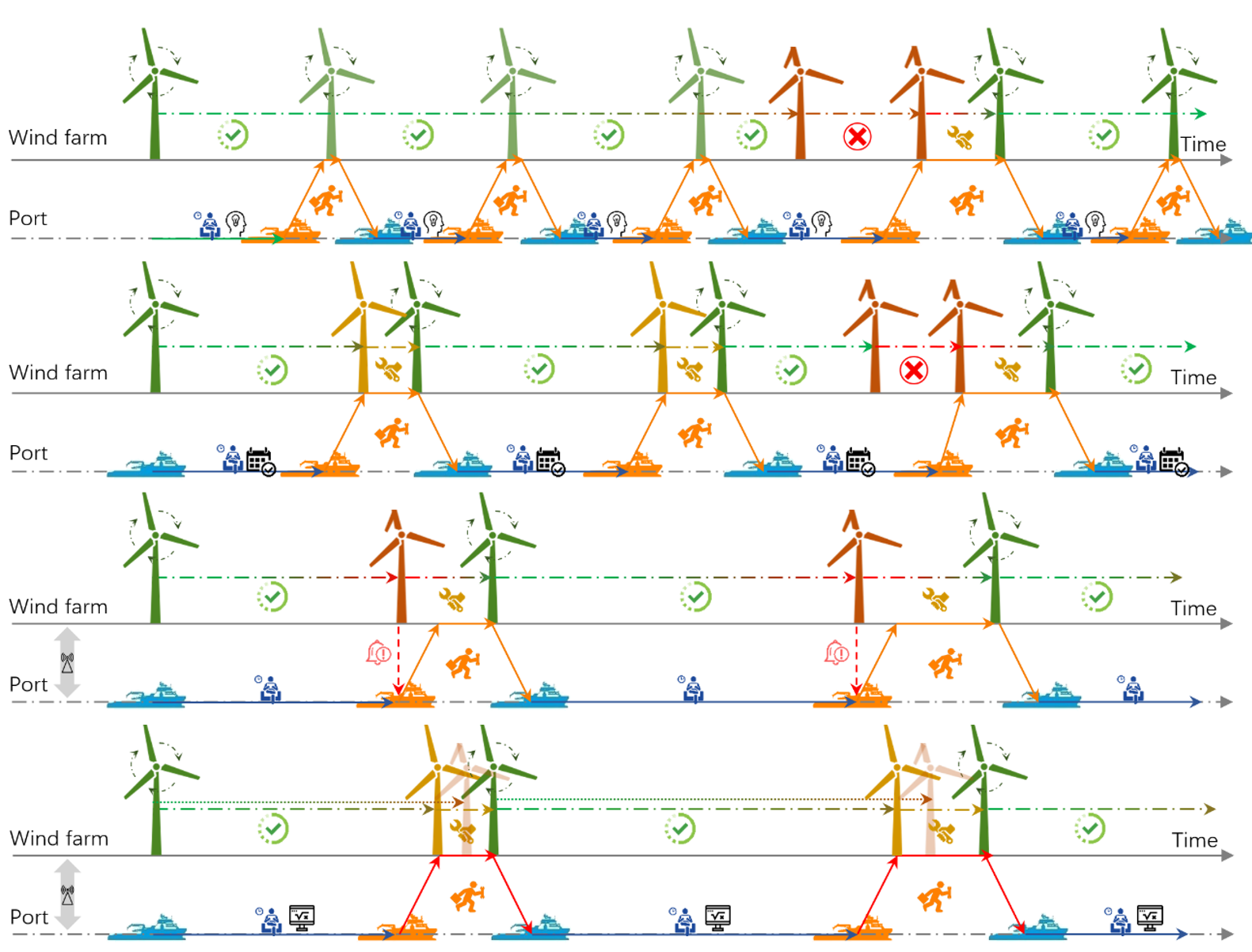
本文综述了海上风电运维的研究现状,涵盖运维策略选择、进度优化、现场作业、维修、评估标准、回收利用和环境考量。对比了多种方法,描述了研究和工业发展中的局限性,并指出了未来研究的有前景方向。文章入选ESI高被引论文和ESI热点论文。