浅水复杂海底地形下沉箱多拖缆协作拖航的作业性分析方法
2月 2, 2025
·
2 分钟阅读时长
传统拖航方法,包括拖船的湿拖和半潜船的干拖,由于船只约束和深度限制,在浅水中不足。2000年至2020年的历史数据显示,搁浅事故占中国海事事故的7%,且沉箱等结构的事故频发。传统方法无法有效避障,因此需要开发一种能在复杂环境中操作的新拖航系统,以降低风险并提升效率。
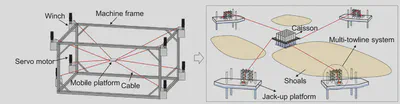
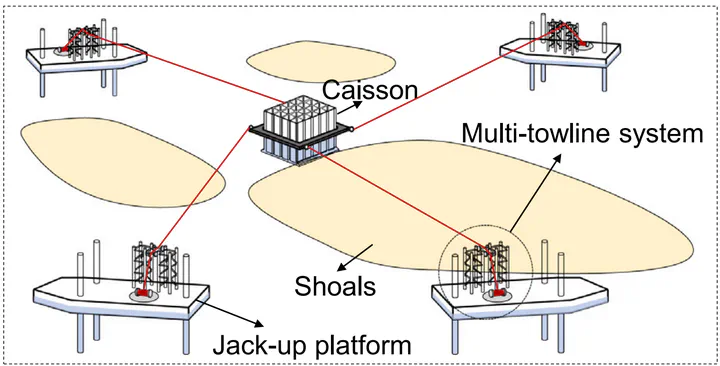
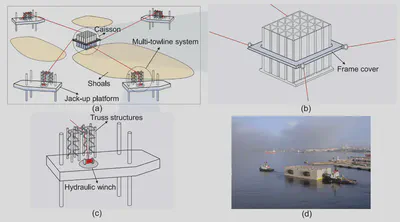
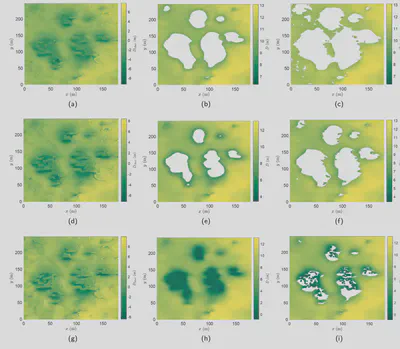
核心创新包括引入受电缆驱动并联机器人启发的多拖缆协作拖航机制,通过多执行器精确控制提升操纵性;简化海底建模方法,将水深数据转换为楔形模块以处理复杂地形;结合势流理论和计算流体动力学验证的概率框架进行极值分析;以及使用反向传播神经网络作为高维插值器预测特征距离并确定可通行区域,体现了可操作性分析中的数据驱动进步。


仿真结果表明,海底坡度和方向显著影响沉箱的水动力响应,如垂荡和纵摇运动。基于非超越概率10^{-2}的极值分析得出的特征距离,有效评估了特定环境条件下的通行性。BP神经网络实现了回归系数0.998和均方误差9.58×10^{-4},能够准确识别可通行区域。总体而言,水深、坡度和方向共同决定了可操作性,该框架为浅水沉箱拖航安全提供了实用工具。
论文链接:https://www.sciencedirect.com/science/article/abs/pii/S0029801825002963
[PDF]