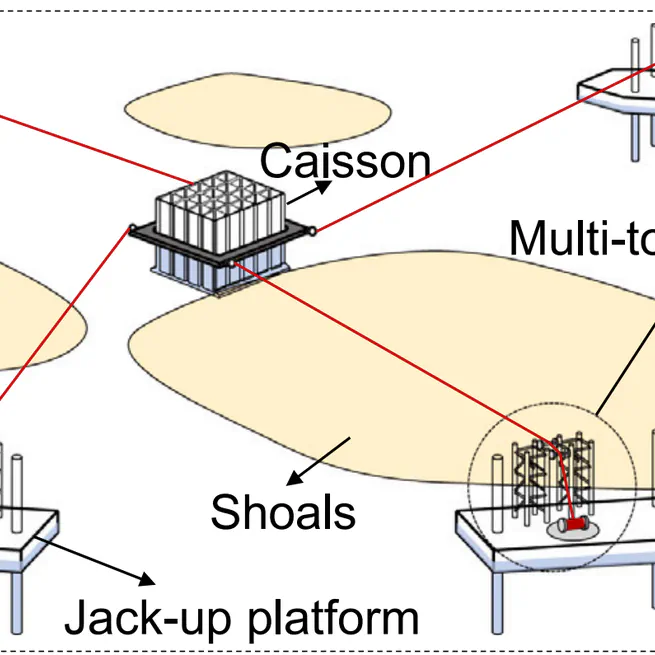
针对浅水复杂海底地形中的沉箱协作拖航可操作性分析,解决了通行性有限、搁浅风险和操纵性受限等关键挑战。通过提出基于电缆驱动并联机器人框架的多拖缆协作拖航方法,提高了海上结构(如港口墙和防波堤)建造的操作灵活性和安全性。这项研究的意义在于为海事作业事故预防提供了新途径,助力海岸工程的可持续发展。
2月 2, 2025